Bras robotique : fonctionnement, types et usages du bras robotisé industriel
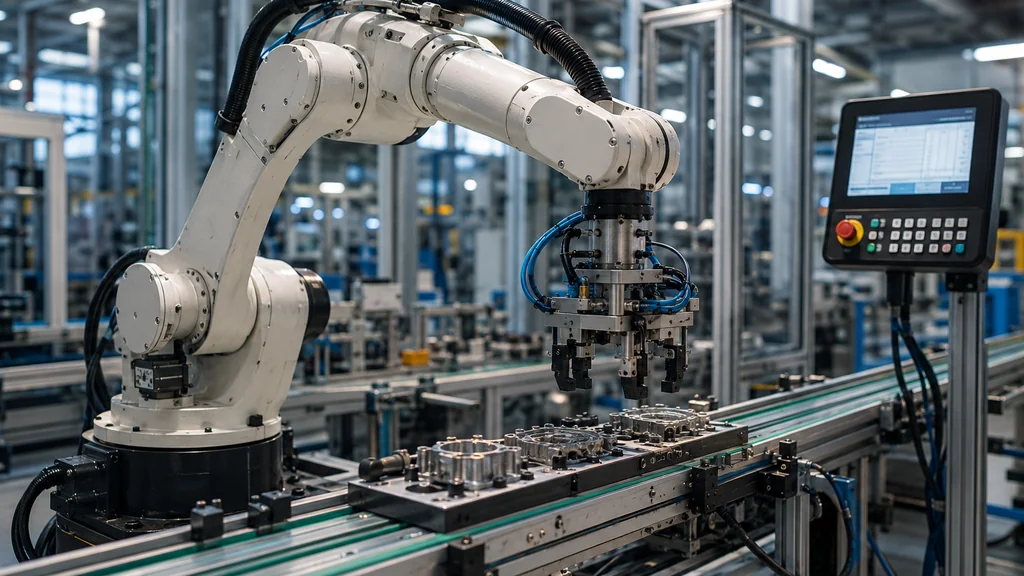
Un bras robotique est un système mécanique programmable capable de reproduire certains mouvements d’un bras humain. Il manipule, déplace, assemble ou transforme des objets avec une précision et une répétabilité que la main humaine ne peut pas toujours atteindre sur de longues durées. On le retrouve dans l’industrie, la logistique, les laboratoires, la chirurgie et même la formation.
Cet article explique comment fonctionne un bras robotisé, quels types existent, dans quels secteurs ils s’appliquent, et quels critères guident le choix d’un équipement.
Les composants d’un bras robotique : ce qui le fait fonctionner
Un bras robotique est une chaîne cinématique : chaque segment est relié au suivant par une articulation motorisée. Comprendre ses composants, c’est comprendre ce qui détermine ses capacités.
La base fixe ou mobile ancre le bras à son environnement. Elle détermine l’encombrement au sol et peut être montée sur un rail ou un socle tournant pour étendre la portée.
Les axes robotisés sont les articulations du bras. Chaque axe ajoute un degré de liberté supplémentaire. Un bras à 6 axes peut atteindre une position dans l’espace avec n’importe quelle orientation, comme un bras humain avec l’épaule, le coude et le poignet.
Les moteurs et réducteurs entraînent chaque axe. Dans les bras industriels, ce sont généralement des servomoteurs électriques couplés à des réducteurs de précision. Leur qualité conditionne directement la précision robotique et la répétabilité du système.
Le contrôleur est le cerveau du bras. Il reçoit le programme, coordonne les mouvements de tous les axes en simultané et gère les paramètres de vitesse, d’accélération et de trajectoire. C’est lui qui permet au bras de suivre un chemin précis dans l’espace.
Les capteurs intégrés (encodeurs, capteurs de force, caméras, lidars selon les modèles) permettent au bras de percevoir son environnement, détecter des obstacles ou adapter sa pression à la tâche. Ils sont essentiels dans les applications collaboratives.
L’effecteur est l’outil fixé à l’extrémité du bras. C’est lui qui réalise concrètement la tâche : pince mécanique, ventouse, torche de soudage, pistolet de peinture, outil de vissage, caméra d’inspection ou instrument médical. Le choix de l’effecteur est aussi important que le choix du bras lui-même.
Les quatre grands types de bras robotiques
Les architectures de bras robotisé varient selon les contraintes de chaque application : vitesse, précision, portée, charge utile ou collaboration avec l’humain.
| Type | Structure | Usage typique | Limite principale |
|---|---|---|---|
| Bras articulé 6 axes | 6 articulations rotatifs | Soudage, assemblage, palettisation | Programmation complexe |
| Robot SCARA | 3-4 axes, mouvements horizontaux | Pick and place, vissage, emballage | Peu adapté aux mouvements verticaux complexes |
| Robot cartésien | 3 axes linéaires (X, Y, Z) | Découpe, impression 3D, CNC | Encombrement important |
| Cobot | 6 axes, conçu pour la collaboration | Assemblage mixte, laboratoire, formation | Charge utile souvent limitée |
Le bras articulé 6 axes est la forme la plus répandue dans l’automatisation industrielle. Sa flexibilité lui permet d’atteindre pratiquement n’importe quel point dans sa sphère de travail. Les grands fabricants mondiaux (Fanuc, KUKA, ABB, Yaskawa) produisent des bras couvrant des charges utiles de quelques kilos à plusieurs centaines de kilos.
Le robot SCARA (Selective Compliance Assembly Robot Arm) excelle dans les mouvements rapides sur un plan horizontal. Il est particulièrement utilisé pour le pick and place à haute cadence, le vissage ou l’insertion de composants électroniques.
Le robot cartésien se déplace sur trois axes linéaires perpendiculaires. Sa structure simple garantit une précision élevée et une grande rigidité. Il équipe souvent les tables de découpe, les machines de perçage, les imprimantes industrielles et certains systèmes de palettisation.
Le cobot (robot collaboratif) est conçu pour travailler à proximité directe d’un opérateur humain sans cage de sécurité obligatoire dans certaines configurations. Il embarque des capteurs de force et de détection permettant de s’arrêter ou de ralentir en cas de contact imprévu. Universal Robots, Fanuc CR, KUKA iiwa ou Doosan sont parmi les marques présentes sur ce segment.
Applications concrètes du bras robotique par secteur
Un bras robotique ne se résume pas à la chaîne automobile. Ses usages couvrent aujourd’hui des domaines très variés.
Industrie et assemblage : c’est l’usage historique du bras robotisé. Soudage à l’arc ou par points, assemblage de sous-ensembles, serrage de vis, collage, découpe au laser — les applications sont nombreuses. La précision robotique permet de travailler sur des tolérances de l’ordre du dixième de millimètre sur des millions de cycles.
Palettisation et manutention : dans les entrepôts et les usines, les bras robotiques prennent en charge le dépilage, le tri, la palettisation et le transfert de charges. Ils remplacent les tâches physiques répétitives qui génèrent des troubles musculo-squelettiques.
Agroalimentaire et conditionnement : le bras robotisé saisit, oriente, place et emballe des produits alimentaires avec une hygiène et une cadence difficilement atteignables manuellement. Les effecteurs spécifiques (ventouses souples, pinces adaptatives) permettent de manipuler des produits fragiles.
Laboratoire et médical : les bras robotiques assistent les analyses biologiques (pipetage automatisé, manipulation d’échantillons), la chirurgie mini-invasive ou la rééducation fonctionnelle. La précision des mouvements et leur reproductibilité sont des atouts décisifs dans ces environnements.
Éducation et recherche : les kits robotiques éducatifs (bras à 4 ou 6 axes à faible coût) permettent d’initier les étudiants à la programmation robotique, à la cinématique et à l’automatisation. Ils constituent une passerelle entre la théorie et les systèmes industriels réels.
Avantages du bras robotisé en production et en logistique
Les bénéfices d’un bras robotique sont bien documentés dans les environnements de production à fort volume ou à forte contrainte de précision.
Répétabilité et précision : un bras robotique industriel peut répéter le même geste avec une précision de ±0,02 mm sur des milliers de cycles, sans dérive due à la fatigue. C’est impossible à atteindre avec une main humaine sur la durée.
Productivité continue : contrairement à un opérateur humain, un bras robotique peut fonctionner en 3×8 sans pause, sans arrêt pour fatigue ni variation de cadence. Pour les productions à fort volume, c’est un avantage économique majeur.
Réduction des tâches pénibles : les tâches de manutention lourde, de soudage en atmosphère dégradée, de manipulation de produits dangereux ou de gestes très répétitifs peuvent être confiées au robot, réduisant l’exposition des opérateurs aux risques physiques et chimiques.
Flexibilité par reprogrammation : un même bras peut être reprogrammé pour une nouvelle tâche ou un nouveau produit sans remplacement matériel. Cette flexibilité réduit les coûts de reconfiguration des lignes de production.
Limites et critères de choix d’un bras robotique
Un bras robotique n’est pas une solution universelle. Plusieurs facteurs conditionnent son efficacité réelle.
Le coût total d’acquisition inclut le bras, le contrôleur, l’effecteur, l’intégration mécanique, la programmation et la mise en service. Pour un bras industriel standard, le coût de départ peut dépasser 50 000 euros une fois l’ensemble installé. Les cobots sont souvent moins coûteux à l’achat mais nécessitent également une intégration sérieuse.
La programmation et la mise en service requièrent des compétences spécifiques. La plupart des bras industriels utilisent des langages propriétaires ou des interfaces de programmation visuelles. Un intégrateur robotique est souvent nécessaire pour le premier déploiement.
La charge utile et la portée sont les deux premiers critères techniques à vérifier. Un bras sous-dimensionné en charge sera imprécis ou se dégradera prématurément. Un bras surdimensionné représente un coût inutile.
La maintenance est une contrainte permanente : lubrification, remplacement des réducteurs, calibrage des axes, mise à jour du contrôleur. Un arrêt non planifié sur une ligne de production a un coût immédiat.
L’environnement d’utilisation influence le choix du modèle : température, poussière, humidité, présence de projections chimiques ou de rayonnements imposent des indice de protection (IP) spécifiques. Un bras conçu pour un laboratoire propre n’est pas adapté à une fonderie.
Choisir le bon bras robotique : axes, charge et effecteur avant tout
Le choix d’un bras robotisé repose sur quelques paramètres fondamentaux à définir avant toute consultation de fabricants. Le nombre d’axes nécessaires dépend de la complexité des trajectoires : une application de palettisation peut se contenter de 4 axes, tandis qu’un assemblage en espace confiné requiert 6 axes minimum.
La charge utile doit intégrer le poids de l’effecteur en plus de la pièce manipulée. La portée doit couvrir l’ensemble de la zone de travail sans que le bras n’atteigne ses limites mécaniques. La précision robotique requise par l’application détermine également la gamme de produits à envisager : certains bras d’entrée de gamme offrent une répétabilité de ±0,1 mm, suffisante pour la palettisation, mais insuffisante pour l’assemblage de composants électroniques fins.
Enfin, l’effecteur reste souvent le composant le plus critique : mal dimensionné ou mal choisi, il annule les avantages du bras lui-même. Prévoir son remplacement ou son évolution dès la phase de conception de la cellule robotique est une bonne pratique que les intégrateurs expérimentés recommandent systématiquement.