Programmation robotique : langages, outils et méthodes pour débuter
La programmation robotique, c’est l’ensemble des instructions écrites par un développeur pour qu’un robot accomplisse des tâches précises. Elle combine logique, algorithmes, traitement de données issues de capteurs, et commandes envoyées aux actionneurs. Que ce soit pour faire avancer un robot éducatif ou piloter un bras industriel, tout repose sur du code.
Cet article explique comment fonctionne la programmation d’un robot, quels langages utiliser selon son niveau, et comment progresser efficacement.
Ce que programme-t-on réellement dans un robot
Un robot agit grâce à deux types de composants physiques : les capteurs (qui perçoivent l’environnement : distance, lumière, température, son) et les actionneurs (qui produisent des actions : moteurs, servos, pinces, haut-parleurs). La programmation robotique consiste à traiter les données des capteurs pour déclencher les bonnes actions via les actionneurs.
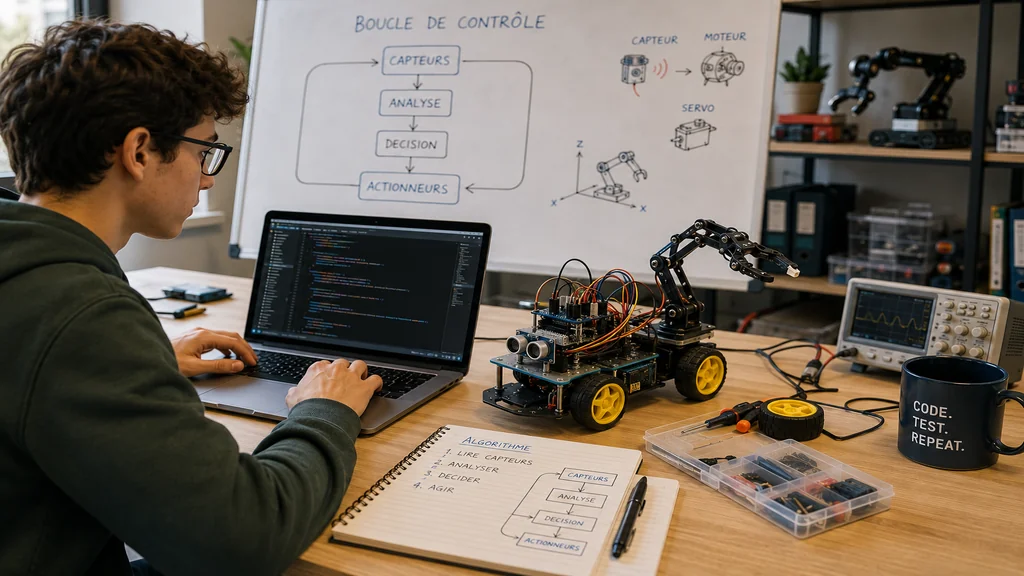
Concrètement, un programme robotique suit souvent cette logique :
- Lire les données capteurs
- Les analyser via un algorithme
- Décider d’une action
- Envoyer une commande aux actionneurs
Ce cycle se répète en continu. C’est ce qu’on appelle une boucle de contrôle. Plus le robot est sophistiqué, plus cette boucle intègre de la logique conditionnelle, de la mémoire d’état, voire de l’apprentissage automatique.
Un algorithme simple peut suffire pour un robot qui suit une ligne au sol. Mais dès qu’on introduit plusieurs capteurs, des contraintes de temps réel ou des comportements adaptatifs, la complexité du programme augmente rapidement. C’est pourquoi la programmation robotique touche autant à l’informatique embarquée qu’à l’algorithmique et, dans les projets avancés, à l’intelligence artificielle.
Différents types de robots, différentes approches de programmation
Tous les robots ne se programment pas de la même façon. Il est utile de distinguer quatre grandes catégories :
Le robot éducatif (Thymio, mBot, Lego Mindstorms) est conçu pour l’apprentissage. Il se programme souvent visuellement, via des blocs. L’objectif est de comprendre la logique sans barrière syntaxique.
Le robot programmable DIY (Arduino, Raspberry Pi) s’adresse aux makers et aux étudiants. Il demande un langage textuel, mais reste accessible avec un peu de pratique.
Le robot industriel (bras Fanuc, Kuka, ABB) utilise des langages propriétaires dédiés ou des couches logicielles standardisées. La programmation y est plus rigide, orientée sécurité et précision.
Le robot autonome ou mobile (robots de livraison, drones intelligents, robots chirurgicaux) nécessite des architectures plus complexes : fusion de capteurs, planification de trajectoire, vision par ordinateur, parfois de l’IA embarquée.
Les langages de programmation utilisés en robotique
Le choix du langage dépend du niveau de l’utilisateur, du type de robot et de l’usage visé. Voici un tableau comparatif des principaux outils :
| Langage / Outil | Niveau | Usage principal | Exemple concret |
|---|---|---|---|
| Scratch | Débutant (enfant) | Robot éducatif, initiation | Programmer un Thymio ou mBot |
| Arduino (C++) | Débutant adulte | Prototype, capteurs, moteurs | Contrôler un bras DIY |
| Python | Intermédiaire | IA, traitement de données, ROS | Robot mobile, vision |
| C / C++ | Avancé | Systèmes embarqués, temps réel | Microcontrôleurs, drones |
| ROS (Robot Operating System) | Avancé | Robots complexes, modulaires | Robot autonome multi-capteurs |
Scratch permet de programmer par blocs glisser-déposer. Aucune syntaxe à maîtriser : idéal pour les enfants ou pour une première découverte de la logique robotique.
Arduino repose sur du C++ simplifié. On écrit un programme qui s’exécute en boucle sur une carte microcontrôleur. C’est l’entrée idéale pour comprendre comment un programme interagit directement avec du matériel. Un sketch Arduino typique contient une fonction setup() (exécutée une fois au démarrage) et une fonction loop() (exécutée indéfiniment) — exactement la structure d’un programme de contrôle robotique.
Python est aujourd’hui l’un des langages les plus utilisés en robotique, notamment pour sa lisibilité et ses bibliothèques (NumPy, OpenCV, TensorFlow). Il s’interface très bien avec ROS et les systèmes de vision.
C et C++ restent incontournables pour les systèmes embarqués contraints en ressources. La robotique industrielle et les systèmes temps réel y font encore largement appel.
ROS (Robot Operating System) n’est pas un langage mais un framework open source. Il fournit une architecture de communication entre modules (nœuds) et s’appuie sur Python ou C++. C’est le standard de facto pour les robots autonomes complexes en recherche et industrie. ROS 2, sa version actuelle, améliore la robustesse temps réel et s’impose progressivement dans les environnements industriels et médicaux. Comprendre ROS, c’est comprendre comment architecturer un système robotique complet : perception, décision, action.
Programmer un robot : les trois niveaux de progression
Niveau 1 — La programmation par blocs
Point d’entrée naturel pour les enfants et les débutants complets. Scratch, Blockly ou les environnements natifs des robots éducatifs permettent de construire un programme en assemblant des blocs visuels. On apprend les boucles, les conditions et les événements sans se soucier de la syntaxe.
À ce stade, on peut déjà faire bouger un robot, lui faire réagir à des obstacles, jouer des sons ou allumer des LED. L’apprentissage est immédiatement gratifiant : chaque bloc ajouté produit un effet visible sur le robot. Cette approche développe la pensée algorithmique sans la barrière du code textuel, ce qui en fait une excellente introduction quelle que soit la tranche d’âge.
Niveau 2 — La programmation textuelle accessible
Avec Arduino ou MicroPython sur Raspberry Pi, on passe à un vrai langage textuel. Le programme a une structure : initialisation, boucle principale, fonctions. On apprend à lire un capteur, à calculer une valeur, à envoyer une commande PWM à un moteur.
C’est ici que la mécanique de l’algorithme robotique devient concrète. Les erreurs sont plus fréquentes, mais le débogage fait partie de l’apprentissage. Savoir lire un message d’erreur, tester un composant isolément et utiliser le moniteur série pour afficher des valeurs en temps réel sont des compétences clés à acquérir à ce stade. Un projet simple mais complet — comme un robot éviteur d’obstacles avec deux moteurs et un capteur ultrason — permet de mettre en pratique l’ensemble de ces notions.
Niveau 3 — La programmation robotique avancée avec ROS
ROS s’adresse aux étudiants, ingénieurs et chercheurs. Il permet de structurer des projets complexes : plusieurs capteurs, plusieurs actionneurs, navigation autonome, fusion de données. On programme en Python ou en C++, et on fait communiquer des modules indépendants via un système de topics et de services.
À ce niveau, la simulation robotique devient essentielle. Des outils comme Gazebo ou Webots permettent de tester un programme dans un environnement virtuel avant de le déployer sur le vrai robot. Cela réduit les risques de casse, accélère le développement et facilite le débogage.
Simulation, test et sécurité : étapes incontournables
Programmer un robot, c’est aussi tester et sécuriser. Quelques pratiques essentielles :
- Simuler avant de déployer : un bug dans Gazebo ne casse rien ; un bug sur un bras industriel peut être dangereux.
- Déboguer par étapes : tester chaque capteur et chaque actionneur séparément avant d’assembler le programme complet.
- Gérer les cas limites : que se passe-t-il si un capteur renvoie une valeur aberrante ? Le programme doit anticiper les situations imprévues.
- Respecter les contraintes temps réel : certains robots doivent réagir en quelques millisecondes. Un langage trop lent ou un algorithme trop lourd peut compromettre la sécurité.
Dans la robotique industrielle, la programmation inclut aussi des séquences de mise en sécurité (arrêt d’urgence, zones interdites, limites de couple) intégrées dès la conception du programme.
Comment débuter concrètement selon son profil
Enfant (6-12 ans) : commencer avec un robot éducatif comme Thymio, Code-a-Pillar ou mBot, avec l’environnement Scratch associé. L’objectif est de comprendre la causalité programme → action.
Adulte débutant : se procurer un kit Arduino (starter kit officiel ou équivalent), suivre les exemples fournis, puis modifier progressivement le code. Programmer un capteur ultrason, puis un servo, puis les deux ensemble.
Étudiant : combiner Python et ROS via des tutoriels en ligne (ROS Noetic ou ROS 2). Utiliser Gazebo pour simuler avant de tester sur du matériel réel.
Profil technique / professionnel : se former sur C++ embarqué, maîtriser les interruptions et la gestion du temps réel, puis approfondir ROS 2 et les architectures de navigation autonome. Les projets en simulation (Gazebo, Webots) constituent une bonne base avant de travailler sur du matériel industriel réel.
Pourquoi la programmation robotique est une compétence d’avenir
L’automatisation industrielle, la logistique, la chirurgie assistée, les véhicules autonomes : tous ces domaines reposent sur des robots programmables. La demande de compétences en programmation robotique croît rapidement, et les outils pour débuter n’ont jamais été aussi accessibles.
Maîtriser les bases — capteurs, actionneurs, algorithmes de contrôle, simulation — suffit pour créer des projets concrets. La progression est naturelle : des blocs visuels à Python, de Python à ROS, du prototype au robot industriel. Les passerelles entre niveaux sont nombreuses et la communauté autour d’Arduino, de ROS ou de MicroPython propose une quantité considérable de ressources gratuites pour progresser.
L’essentiel est de commencer par manipuler du vrai matériel, de tester souvent, et d’accepter que le débogage fait partie intégrante du processus. Un programme qui ne fonctionne pas du premier coup n’est pas un échec : c’est la norme en robotique, et chaque correction consolide la compréhension du système. C’est précisément cette boucle continue entre programmation, test et ajustement qui caractérise la démarche de tout développeur en robotique, du débutant au professionnel confirmé.