Bras robotique Arduino : matériel, montage, code et erreurs à éviter
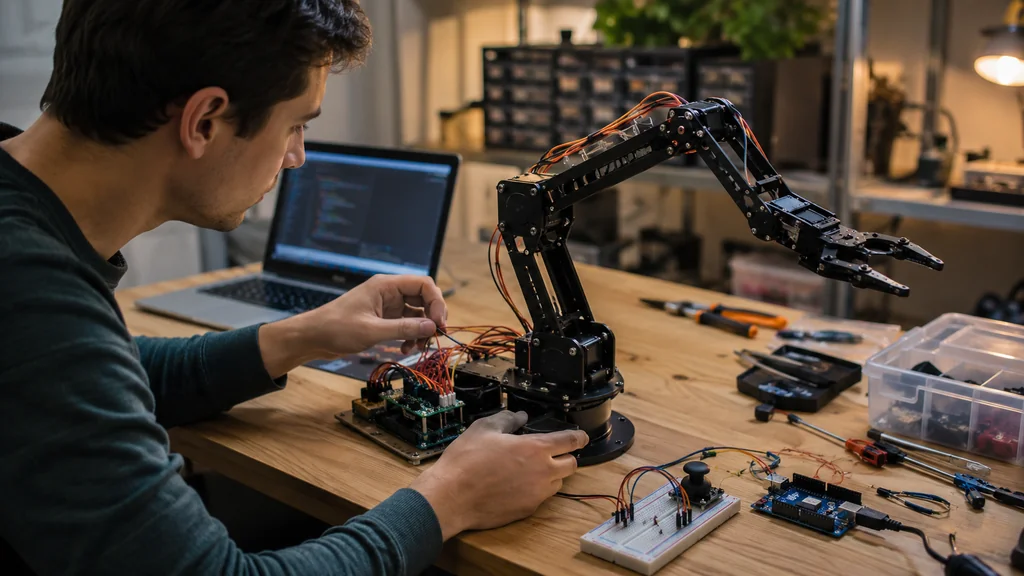
Un bras robotique Arduino est un système mécanique motorisé piloté par une carte Arduino via des servomoteurs. Chaque articulation correspond à un axe contrôlé indépendamment par le code, ce qui permet de reproduire les mouvements d’un bras humain : rotation, élévation, flexion et saisie. Ce type de projet convient aux débutants comme aux makers plus expérimentés, à condition de choisir le bon matériel et de soigner l’alimentation dès le départ.
Cet article couvre tout l’essentiel : le matériel nécessaire, le rôle des servomoteurs, les bases du montage, la programmation avec Arduino IDE et les erreurs les plus fréquentes.
Ce qu’il faut comme matériel pour un bras robotisé Arduino
La liste de composants varie selon le type de bras choisi, mais un projet de base tourne autour des éléments suivants :
- Arduino Uno : suffisante pour un bras à 3 ou 4 axes. Pour un projet plus ambitieux, une Arduino Mega apporte davantage de broches.
- Servomoteurs : entre 3 et 6 selon le nombre d’axes. Les SG90 (petits, légers, pas chers) conviennent pour les démos ; les MG996R sont plus robustes pour porter du poids.
- Une pince robotique : souvent livrée avec un mini servomoteur dédié.
- Un châssis : imprimé en 3D, en acrylique découpé ou issu d’un kit tout-en-un comme le Braccio Arduino.
- Câbles Dupont mâle-femelle et mâle-mâle pour relier les composants.
- Un joystick ou des potentiomètres pour le contrôle manuel en temps réel.
- Une alimentation externe 5V ou 6V : point critique détaillé plus bas.
Le Braccio Arduino est une solution clé en main développée par Arduino, avec 6 axes, des servomoteurs intégrés et une bibliothèque dédiée. Il est plus cher qu’un kit générique, mais offre une base fiable pour un usage éducatif ou semi-professionnel.
Le rôle des servomoteurs et des axes robotiques
Un servomoteur est un moteur à position contrôlée : on lui envoie une valeur d’angle (de 0° à 180° selon le modèle) et il s’y positionne avec précision. C’est la différence fondamentale avec un moteur à courant continu qui tourne en continu.
Dans un bras robotique, chaque axe correspond à un degré de liberté :
- Axe de base : rotation horizontale de l’ensemble du bras.
- Épaule : mouvement vers l’avant ou l’arrière.
- Coude : flexion de l’avant-bras.
- Poignet : inclinaison fine.
- Pince : ouverture et fermeture pour saisir un objet.
Plus le bras a d’axes, plus il est précis et polyvalent, mais plus la gestion du code et de l’alimentation devient complexe.
Principe de montage d’un bras robotique avec Arduino
Le montage d’un bras robotique DIY suit une logique simple. On commence par assembler la structure mécanique axe par axe, en fixant chaque servomoteur à sa position avant de passer au câblage.
Chaque servo possède trois fils :
- VCC (rouge) → alimentation positive
- GND (marron ou noir) → masse commune
- Signal (orange ou jaune) → broche de commande PWM sur l’Arduino
Le fil signal se branche sur une broche numérique PWM de l’Arduino (~3, ~5, ~6, ~9, ~10, ~11 sur l’Uno). Les fils d’alimentation, eux, ne doivent pas être reliés au 5V de la carte Arduino si vous utilisez plusieurs servos.
Un joystick analogique se connecte aux broches A0 et A1 pour piloter deux axes simultanément. Des potentiomètres remplissent le même rôle avec une gestion axe par axe.
Programmer un bras robotique avec Arduino IDE
La bibliothèque standard Servo.h suffit pour la majorité des projets. Elle est intégrée à Arduino IDE et ne nécessite aucune installation supplémentaire.
Exemple minimal pour piloter deux servomoteurs :
#include <Servo.h>
Servo servoBase;
Servo servoEpaule;
void setup() {
servoBase.attach(9);
servoEpaule.attach(10);
}
void loop() {
servoBase.write(90); // Position centrale
servoEpaule.write(45); // Position basse
delay(1000);
servoBase.write(0);
servoEpaule.write(135);
delay(1000);
}
Pour le Braccio Arduino, une bibliothèque dédiée (disponible dans le gestionnaire de bibliothèques d’Arduino IDE) simplifie le contrôle des 6 axes avec une seule fonction Braccio.ServoMovement().
Pour une commande au joystick, la fonction analogRead() lit la valeur du stick (0 à 1023) et la fonction map() la convertit en angle (0 à 180°) avant de l’envoyer au servo.
Tableau des composants, rôles et erreurs à éviter
| Composant | Rôle | Conseil | Erreur fréquente |
|---|---|---|---|
| Arduino Uno | Cerveau du système, envoie les signaux PWM | Utiliser une Mega si plus de 6 servos | Alimenter les servos directement depuis l’Arduino |
| Servomoteur SG90 / MG996R | Contrôle la position de chaque axe | MG996R pour les axes porteurs | Oublier de calibrer la position 0° avant montage |
| Alimentation externe 5-6V | Fournit le courant suffisant aux servos | Minimum 2A par servo sous charge | Utiliser le 5V de la carte : surtension, reset, tremblements |
| Câbles Dupont | Relier les composants sans soudure | Vérifier la continuité avant de coder | GND de l’alimentation non relié au GND Arduino |
Les erreurs les plus fréquentes sur un projet bras robotique Arduino
Alimentation insuffisante : c’est la cause numéro un des problèmes. Un SG90 consomme environ 200 mA à vide, bien plus sous charge. Avec 4 ou 5 servos, le port USB de l’ordinateur ou le régulateur 5V de l’Arduino ne tient pas. Il faut une alimentation externe dédiée aux servos, avec un GND commun partagé avec la carte Arduino.
Masse non partagée : si l’alimentation externe des servos n’est pas reliée au GND de l’Arduino, les signaux PWM sont instables et les servos se comportent de façon erratique.
Servo mal calibré : un servo monté sans vérifier sa position à 0° ou 90° peut forcer mécaniquement contre la butée, ce qui grille le moteur ou déforme la structure.
Surcharge de la pince : une pince robotique bas de gamme ne doit pas saisir d’objets trop lourds. Dépasser la charge maximale du servo de pince provoque une surchauffe rapide.
Tremblement du bras : souvent causé par une alimentation limite, des câbles mal fixés ou un code qui envoie des ordres trop fréquents sans délai entre les mouvements.
Quel niveau faut-il pour construire un bras robotisé Arduino ? 🤖
Un débutant peut réaliser un bras simple à 3 axes en quelques heures avec un kit pré-percé et des servos déjà câblés. La partie la plus accessible est le code : la bibliothèque Servo.h est bien documentée et les exemples fournis avec Arduino IDE suffisent pour démarrer.
La difficulté monte avec le nombre d’axes, le contrôle au joystick en temps réel ou l’ajout d’une séquence de mouvements enregistrés. Un bras à 5 ou 6 axes comme le Braccio Arduino demande une compréhension des tableaux, des boucles et de la gestion du temps dans le code Arduino.
Pour un premier projet, un kit 4 axes avec deux joysticks et des servos MG996R est le meilleur compromis entre coût, difficulté et résultat visible.
Choisir entre kit Braccio, DIY imprimé 3D et kit éducatif pas cher
Le Braccio Arduino offre fiabilité et bibliothèque officielle, mais son prix dépasse souvent les 200 €. Il convient aux établissements scolaires ou aux projets durables.
Un bras DIY imprimé en 3D permet une personnalisation totale. Des fichiers STL sont disponibles sur des plateformes de partage de modèles 3D. Le coût peut descendre sous 50 € en servos et visserie, à condition de disposer d’une imprimante.
Un kit éducatif générique (moins de 30 €) est idéal pour une première expérience : la mécanique est simple, les pièces sont pré-découpées et les servos sont inclus. Les résultats sont moins précis, mais l’apprentissage est rapide et sans prise de risque financière.