Robot Arduino : Composants, Fonctionnement et Premier Projet pour Débuter
Un robot Arduino est un robot programmable piloté par une carte Arduino, le plus souvent un modèle Arduino Uno, qui reçoit les informations de capteurs, exécute un programme et commande des moteurs ou actionneurs. Pour construire son premier robot, il faut généralement une carte Arduino, un châssis, des moteurs DC, un driver moteur, des roues, une batterie et un capteur ultrason. Le projet le plus accessible pour débuter reste une voiture robot Arduino équipée de deux moteurs et d’un capteur de distance, capable d’éviter les obstacles sans montage trop complexe. Que l’on parte d’un kit robot Arduino tout prêt ou de pièces achetées séparément, la logique reste la même : capter une information, la traiter, puis agir sur des moteurs. Cet article détaille les composants indispensables, le fonctionnement général d’un robot Arduino, le choix entre kit tout-en-un et pièces séparées, ainsi que les erreurs de câblage les plus fréquentes chez les débutants.
Qu’est-ce qu’un robot Arduino et comment fonctionne-t-il
Un robot Arduino repose sur un principe simple : capter, traiter, agir. La carte reçoit en permanence des informations issues de ses capteurs, comme la distance détectée par un capteur ultrason ou la lumière perçue par un capteur infrarouge. Ces données sont ensuite analysées par le programme chargé sur la carte, qui décide de l’action à effectuer selon des conditions définies à l’avance. Enfin, la carte envoie des ordres aux moteurs ou actionneurs pour faire avancer, tourner ou arrêter le robot.
Cette logique reste la même quel que soit le projet : un robot suiveur de ligne capte la position d’une ligne sombre au sol grâce à des capteurs infrarouges, traite cette information pour corriger sa trajectoire, puis agit sur ses deux moteurs pour rester centré sur la ligne. Un robot éviteur d’obstacles applique exactement le même schéma, simplement avec un capteur ultrason à la place des capteurs de ligne. Comprendre ce schéma en trois étapes avant de toucher au code permet d’aborder n’importe quel projet de robotique débutant avec une grille de lecture claire, plutôt que de copier un programme sans en saisir la logique.
Les composants essentiels pour construire un robot Arduino
Avant de se lancer, il est utile de distinguer les composants réellement indispensables de ceux qui relèvent d’options ou d’améliorations ultérieures. La carte Arduino Uno reste le choix le plus courant pour débuter, car elle dispose de suffisamment d’entrées et de sorties pour un premier robot, tout en restant simple à programmer via l’Arduino IDE.
| Composant | Rôle | Indispensable | Exemple |
|---|---|---|---|
| Carte Arduino Uno | Traiter les données et piloter le robot | Oui | Cerveau du robot |
| Driver moteur | Alimenter les moteurs sans abîmer la carte | Oui | Module L298N |
| Moteur DC | Faire tourner les roues | Oui | Moteur 6V à réducteur |
| Capteur ultrason | Mesurer une distance | Selon le projet | Détection d’obstacle |
À cela s’ajoutent un châssis pour fixer les éléments, des roues adaptées aux moteurs, une batterie dédiée à l’alimentation des moteurs et des câbles de qualité suffisante pour éviter les faux contacts. Le driver moteur mérite une attention particulière : il sert d’intermédiaire entre la carte et les moteurs, car ces derniers consomment plus de courant que ce que les broches Arduino peuvent fournir directement. Selon le projet visé, d’autres capteurs viennent compléter cette base, comme des capteurs infrarouges pour un suiveur de ligne ou un servomoteur pour orienter un capteur ultrason, mais aucun de ces ajouts n’est nécessaire pour un tout premier montage.
Kit robot Arduino ou montage pièce par pièce : que choisir pour débuter
Un kit robot Arduino regroupe l’ensemble des composants nécessaires, déjà sélectionnés pour être compatibles entre eux, souvent accompagnés d’un schéma de câblage et d’un exemple de code. Cette solution convient particulièrement bien à un débutant en robotique, car elle évite les mauvaises surprises liées à des pièces incompatibles ou à une documentation absente. Le montage reste guidé, ce qui permet de se concentrer sur la compréhension du fonctionnement plutôt que sur la recherche de composants.
Acheter les pièces séparément offre en revanche plus de liberté : choix précis du châssis, des moteurs, du type de capteur ou de la taille des roues selon le projet visé. Cette approche demande cependant de vérifier soi-même la compatibilité électrique entre les éléments, en particulier les tensions supportées par les moteurs et le driver moteur, ainsi que la disponibilité de connecteurs adaptés entre les différents modules. Pour un premier robot Arduino, partir d’un kit reste généralement le choix le plus sûr, avant d’évoluer vers des montages personnalisés une fois les bases acquises et le vocabulaire technique mieux maîtrisé.
Voiture robot, suiveur de ligne, éviteur d’obstacles : quel premier projet choisir
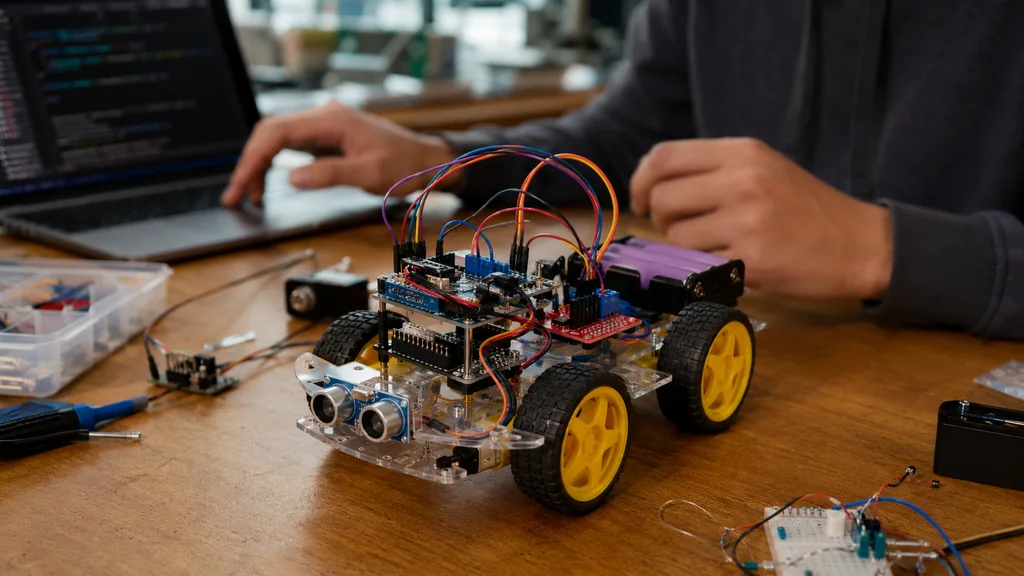
Plusieurs projets reviennent systématiquement chez les débutants, chacun avec un niveau de difficulté différent. La voiture robot Arduino classique, composée de deux moteurs et d’un capteur ultrason, reste le point d’entrée le plus accessible : elle permet de comprendre le câblage moteur, la lecture d’un capteur et les premières lignes de programmation Arduino sans complexité excessive.
Le robot suiveur de ligne ajoute une dimension supplémentaire avec la gestion de plusieurs capteurs infrarouges et une logique de correction de trajectoire plus fine, puisqu’il faut ajuster en permanence la vitesse de chaque moteur selon la position détectée. Le robot éviteur d’obstacles reprend la base de la voiture robot en y ajoutant une prise de décision plus élaborée, par exemple en faisant pivoter un servomoteur porteur du capteur pour scanner plusieurs directions avant de choisir la trajectoire la plus dégagée. Le bras robot Arduino, plus avancé, demande de maîtriser plusieurs servomoteurs simultanément et reste préférable comme deuxième ou troisième projet plutôt que comme point de départ.
Programmer un robot Arduino avec l’Arduino IDE : les bases à connaître
La programmation Arduino repose sur un langage proche du C/C++, simplifié pour rester accessible. L’Arduino IDE, le logiciel utilisé pour écrire et transférer le code vers la carte, structure tout programme autour de deux fonctions principales : une exécutée une seule fois au démarrage, l’autre répétée en boucle continue. C’est dans cette boucle que se déroule la logique capter-traiter-agir décrite plus haut.
Sans entrer dans un cours de code complet, quelques notions suffisent pour les premiers projets : la lecture d’une entrée numérique ou analogique pour un capteur, l’écriture d’une sortie pour piloter un moteur via le driver moteur, et des conditions simples du type « si la distance est inférieure à un seuil, alors tourner ». Cette logique conditionnelle, associée à quelques boucles, couvre la grande majorité des comportements d’un robot Arduino débutant. La plupart des kits robot Arduino fournissent d’ailleurs un exemple de code fonctionnel, qu’il est conseillé de lire et de comprendre ligne par ligne avant de chercher à le modifier ou à l’enrichir.
Câblage et alimentation : les erreurs à éviter sur un robot Arduino 🤖
La plupart des pannes rencontrées par les débutants proviennent d’un nombre limité d’erreurs récurrentes. La première consiste à brancher un moteur DC directement sur les broches de la carte Arduino : le courant appelé par le moteur dépasse ce que la carte peut fournir et risque de l’endommager. Un driver moteur reste indispensable dès qu’un moteur est impliqué, sans exception.
La seconde erreur fréquente concerne l’alimentation : utiliser la même source pour la carte et pour les moteurs provoque souvent des redémarrages intempestifs ou un comportement erratique du robot, en particulier lors des phases de démarrage des moteurs qui consomment davantage de courant. Séparer l’alimentation logique de l’alimentation moteur règle la plupart de ces instabilités, tout en prolongeant la durée de vie des composants électroniques sensibles de la carte. Enfin, un câblage confus, sans organisation ni repérage des fils, complique inutilement le diagnostic en cas de panne. Prendre le temps d’organiser proprement les connexions dès le premier montage facilite grandement l’évolution future du robot vers des projets plus ambitieux.