Main robotique : fonctionnement, types, prix et différences avec la main bionique
Une main robotique est un dispositif mécanique conçu pour reproduire tout ou partie des mouvements d’une main humaine. Elle peut servir à apprendre la robotique, à manipuler des objets dans une cellule industrielle, à réaliser un projet maker avec Arduino ou à remplacer fonctionnellement une main absente dans le cas d’une prothèse. Les prix vont de quelques dizaines d’euros pour un kit éducatif à plusieurs dizaines de milliers pour une prothèse myoélectrique médicale. Entre ces deux extrêmes, les usages, les technologies et les contraintes sont radicalement différents.
Ce qu’est réellement une main robotique
Le terme « main robotique » recouvre des réalités très différentes selon le contexte. Dans sa définition la plus large, il s’agit de tout dispositif articulé capable d’effectuer des mouvements de préhension ou de manipulation à l’aide de doigts articulés, de servomoteurs et d’un système de commande électronique.
On distingue quatre grandes familles :
La main robotique éducative ou maker est un kit mécanique et électronique destiné à apprendre la robotique, la programmation et l’électronique. Elle fonctionne généralement avec un microcontrôleur de type Arduino, des servomoteurs bas coût et des tendons en câbles. L’impression 3D a considérablement simplifié leur fabrication.
Le préhenseur robotique industriel est un organe terminal monté sur un bras robotisé. Il peut prendre la forme d’une pince à deux doigts, d’une main à plusieurs doigts, ou d’un outil ventouse. Sa fonction est la préhension robotique en production, pas la ressemblance avec une main humaine.
La main robotique de recherche est un dispositif haute performance utilisé dans les laboratoires pour explorer la manipulation dextre, l’apprentissage machine ou le contrôle fin. Ces mains sont complexes, coûteuses et rarement disponibles hors contexte académique ou industriel avancé.
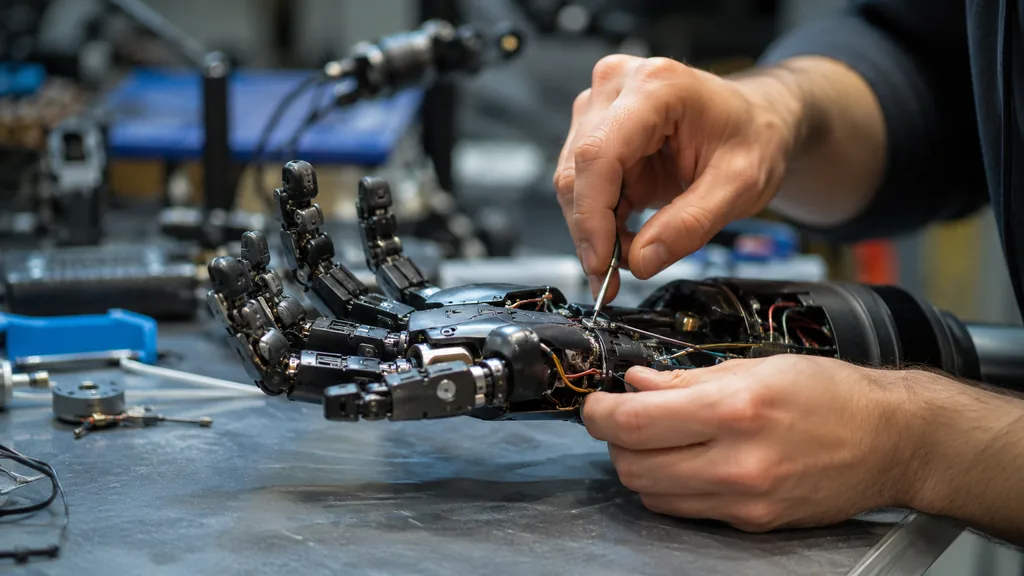
La main bionique ou prothèse de main est un dispositif médical destiné aux personnes amputées ou présentant une malformation. Elle se distingue techniquement et réglementairement des autres catégories.
Comment fonctionne une main robotique
Quel que soit le type, une main robotique repose sur les mêmes composants fondamentaux :
Les doigts articulés reproduisent les phalanges humaines. Chaque doigt comporte une ou plusieurs articulations, actionnées par des câbles (tendons artificiels), des servomoteurs intégrés ou des actionneurs pneumatiques dans les versions industrielles avancées.
Les servomoteurs sont les moteurs qui commandent les mouvements. Dans un kit éducatif, ce sont des micro-servos standard. Dans une main robotique avancée, des actionneurs linéaires ou des moteurs sans balais plus précis sont utilisés pour obtenir une force et une précision contrôlées.
Les capteurs enrichissent la main en retour d’information : capteurs de force et de pression au niveau des doigts, capteurs tactiles, encodeurs de position. Dans les mains de recherche et certains préhenseurs industriels, la vision par caméra complète le dispositif pour identifier la forme et la position de l’objet à saisir.
Le microcontrôleur ou le calculateur embarqué coordonne les actionneurs et traite les signaux des capteurs. Un projet Arduino utilise une carte Uno ou Nano. Une main robotique professionnelle peut s’interfacer avec ROS (Robot Operating System) pour une intégration dans un système robotique complet.
La commande musculaire (ou électromyographie, EMG) est spécifique aux prothèses : les signaux électriques émis par les muscles résiduels du moignon sont captés par des électrodes de surface, interprétés et traduits en mouvements de la main artificielle.
Projet Arduino et impression 3D : construire sa main robotique
Arduino et l’impression 3D ont démocratisé la fabrication de mains robotiques pour l’apprentissage et la recherche amateur. Des projets open source comme InMoov ou e-NABLE permettent de télécharger des fichiers STL, d’imprimer les pièces en PLA ou en PETG, puis d’assembler une main fonctionnelle pour quelques dizaines à quelques centaines d’euros.
Le principe est simple : chaque doigt est relié par un câble à un servomoteur logé dans l’avant-bras ou dans la paume. Le microcontrôleur Arduino pilote les servos selon un programme prédéfini ou en réponse à des capteurs (flex sensors, potentiomètres, EMG low cost). Ces projets sont d’excellents supports de robotique éducative : ils couvrent la mécanique, l’électronique, la programmation et parfois les bases du traitement du signal.
Leurs limites sont réelles : force limitée, précision faible, fragilité des pièces imprimées, absence de retour sensoriel fiable. Ils ne sont pas adaptés à un usage intensif ou à une application médicale.
Main bionique et prothèse myoélectrique : une catégorie à part
La main bionique est une prothèse de main destinée à compenser une amputation ou une malformation. Elle se distingue des mains robotiques éducatives ou industrielles sur plusieurs points essentiels.
Sur le plan technique, une prothèse myoélectrique capte les signaux musculaires résiduels via des électrodes placées sur la peau du moignon. Ces signaux déclenchent les mouvements de la main artificielle. Les modèles avancés permettent de sélectionner différentes prises (prise en pince, prise en crochet, prise tridigitale) et d’ajuster la force appliquée.
Sur le plan réglementaire, une prothèse est un dispositif médical soumis à certification (marquage CE de classe IIa ou IIb en Europe). Sa prescription, son adaptation et son remboursement partiel par l’Assurance Maladie relèvent d’un parcours médical spécifique. Il ne faut pas confondre une main robotique open source et une prothèse de main homologuée.
Les fabricants de référence dans ce domaine incluent Ottobock, Össur ou Naked Prosthetics. Pour toute situation réelle d’amputation ou de besoin prothétique, seul un médecin spécialiste et un prothésiste certifié peuvent orienter vers la solution adaptée.
Les prix d’une main robotique selon le type
| Type | Fourchette de prix | Exemples d’usage | Principale limite |
|---|---|---|---|
| Kit éducatif / Arduino | 20 – 200 € | Apprentissage, école, maker | Force et précision faibles |
| Main robotique programmable | 200 – 2 000 € | Projet R&D, démonstration | Intégration complexe |
| Préhenseur industriel | 1 000 – 15 000 € | Bras robotisé, usine | Pas humanoïde |
| Main de recherche avancée | 10 000 – 50 000 € | Laboratoire, IA, dextérité | Coût, fragilité |
| Prothèse myoélectrique | 10 000 – 80 000 € | Médical, amputation | Prescription requise |
Ces fourchettes sont indicatives. Le coût réel d’un projet intégrant une main robotisée doit inclure la programmation, l’intégration mécanique, les capteurs complémentaires et la maintenance.
Les limites techniques des mains robotiques actuelles
Malgré des progrès rapides, la main robotique actuelle reste loin des capacités de la main humaine sur plusieurs aspects :
La dextérité fine. Saisir un objet mou sans l’écraser, manipuler un objet fragile ou effectuer des gestes précis à grande vitesse reste difficile. La main humaine exploite des milliers de récepteurs tactiles que les capteurs actuels ne répliquent qu’imparfaitement.
Le retour sensoriel. Les mains robotiques industrielles et éducatives n’offrent pas de retour haptique au pilote. Certaines prothèses bioniques avancées explorent cette voie, mais elle reste expérimentale.
L’autonomie énergétique. Une main avec plusieurs servomoteurs consomme une énergie significative. Les batteries limitent l’autonomie, en particulier pour les prothèses portées toute une journée.
La robustesse mécanique. Les articulations, câbles et actionneurs s’usent. La maintenance d’une main robotique complexe demande des compétences techniques et un accès aux pièces détachées.
La calibration et l’apprentissage. Interfacer une main robotique avec un système de commande musculaire ou un algorithme d’apprentissage par renforcement nécessite du temps, des données et des compétences spécialisées.
Choisir une main robotique selon son projet et son budget 🖐️
Le choix d’une main robotique dépend entièrement de l’objectif. Pour un projet scolaire ou maker, un kit Arduino avec impression 3D est le point d’entrée logique, pour moins de 150 euros. Pour un projet de recherche ou d’intégration sur bras robotisé, un préhenseur robotique commercial avec interface ROS offrira une base fiable. Pour un besoin médical lié à une amputation, seul le parcours prothétique avec un professionnel de santé est adapté : aucune main artificielle issue du marché maker ne peut se substituer à une prothèse myoélectrique certifiée. Dans tous les cas, le budget réel d’un projet intégrant une main robotisée dépasse presque toujours le coût du dispositif seul.