Automate robot : quelle différence entre automate, robot et automatisation ?
L’expression « automate robot » mélange deux notions que l’industrie distingue précisément. Un automate exécute une séquence programmée dans un environnement prévisible. Un robot est une machine programmable dotée de capteurs, d’actionneurs et d’une capacité à interagir avec son environnement de façon plus ou moins adaptative. Les deux font partie du même écosystème d’automatisation industrielle, mais ils ne jouent pas le même rôle. Cet article clarifie ces définitions, explique leurs différences et donne des exemples concrets pour comprendre quand utiliser l’un ou l’autre.
Automate et robot : deux notions proches mais distinctes
Un automate est un système qui exécute automatiquement une séquence d’actions prédéfinies. Il ne perçoit pas son environnement de façon autonome et ne s’adapte pas à des situations imprévues. Une porte qui s’ouvre à l’approche d’une personne, un distributeur automatique de boissons ou un feu tricolore sont des automates simples : ils réagissent à un signal d’entrée selon une logique programmée.
Un robot va plus loin. Il combine des actionneurs (pour agir physiquement), des capteurs (pour percevoir son environnement) et un programme de contrôle capable de moduler son comportement selon les informations reçues. Un bras robotique industriel qui détecte la présence d’une pièce mal positionnée et adapte sa trajectoire en temps réel est un robot. Une simple vanne qui s’ouvre à une pression donnée est un automate.
La frontière est parfois floue. Un robot peut être intégré dans un système automatisé plus large et fonctionner comme un automate dans ce contexte. À l’inverse, un automate moderne peut embarquer des modules de décision qui l’approchent d’un comportement robotique. Ce qui les distingue fondamentalement reste le degré de perception de l’environnement et la capacité d’adaptation.
Définir un automate programmable industriel (API)
L’automate programmable industriel, souvent appelé API ou PLC (Programmable Logic Controller), est le composant central de l’automatisation industrielle. C’est un ordinateur robuste conçu pour résister aux conditions de l’environnement industriel (vibrations, poussière, chaleur) et pour piloter des machines, des capteurs et des actionneurs en temps réel.
L’API lit en permanence les entrées (état des capteurs, boutons, signaux de machines) et commande les sorties (moteurs, vannes, voyants, convoyeurs) selon le programme chargé. Il exécute des cycles de scrutation de l’ordre de quelques millisecondes et garantit un comportement déterministe : les mêmes entrées produisent toujours les mêmes sorties.
Il n’a pas de mobilité propre, pas de main, pas de perception visuelle native. Son rôle est de coordonner et piloter un système automatisé, pas d’agir physiquement dans l’espace. C’est là que le robot prend le relais.
Ce qu’est un robot industriel et comment il s’intègre dans l’automatisation
Un robot industriel est une machine programmable, généralement articulée, qui effectue des tâches physiques avec précision et répétabilité. Il est équipé d’actionneurs (servomoteurs, vérins) pour se mouvoir, de capteurs (encodeurs, caméras, capteurs de force) pour percevoir et d’un contrôleur pour piloter l’ensemble.
Ses usages principaux : soudage, peinture, assemblage, palettisation, contrôle qualité par vision artificielle, manutention. Dans une cellule robotisée, le robot industriel travaille dans un espace délimité, souvent protégé par des barrières de sécurité, et coopère avec l’automate programmable qui orchestre la ligne de production.
Le cobot (robot collaboratif) est une variante conçue pour travailler aux côtés des opérateurs humains sans cage de sécurité. Il intègre des capteurs de force qui détectent un contact et stoppent immédiatement le mouvement. Il est plus lent qu’un robot industriel classique, mais plus flexible et plus facile à reprogrammer pour une nouvelle tâche.
Tableau comparatif : automate, robot, robot industriel et cobot
| Notion | Rôle principal | Exemple concret | Limite principale |
|---|---|---|---|
| Automate (API) | Piloter et coordonner un système | Commande d’une ligne de convoyeurs | Pas de mobilité, pas d’adaptation fine |
| Robot industriel | Effectuer des tâches physiques précises | Bras de soudage en usine automobile | Cage de sécurité, reprogrammation complexe |
| Cobot | Collaborer avec un opérateur humain | Vissage assisté en atelier | Plus lent, charge utile limitée |
| Robot mobile autonome | Se déplacer et transporter des charges | AGV en entrepôt logistique | Cartographie, infrastructure requise |
Quelle différence entre automatisation et robotique ?
L’automatisation est un concept large : il désigne le fait de faire exécuter une tâche par un système mécanique, électronique ou informatique, sans intervention humaine directe. Elle englobe les automates, les machines semi-automatiques, les systèmes de contrôle-commande et les robots.
La robotique est une branche de l’automatisation qui se concentre sur les robots : conception, programmation, intégration et exploitation de machines physiques programmables dotées de capteurs et d’actionneurs. Elle mobilise de la mécanique, de l’électronique, de l’informatique et de plus en plus de l’intelligence artificielle.
En résumé : tout ce qui relève de la robotique fait partie de l’automatisation, mais l’automatisation ne se réduit pas à la robotique. Une usine peut être très automatisée avec très peu de robots, en s’appuyant principalement sur des API et des machines spécialisées.
Quand utiliser un automate et quand utiliser un robot ?
Le choix entre automate et robot dépend de la nature de la tâche à réaliser.
Un automate programmable est adapté quand la tâche est logique, séquentielle et prévisible : gérer l’ordre d’allumage de machines, piloter un convoyeur, surveiller des capteurs de sécurité et déclencher des alarmes. Il est fiable, rapide à programmer pour des séquences définies et facile à maintenir.
Un robot devient nécessaire quand la tâche implique un mouvement physique complexe, de la précision spatiale ou une interaction avec des pièces variables. Poser un joint d’étanchéité sur une carrosserie, visser des composants à des positions différentes selon les modèles ou trier des colis par forme nécessite un robot, pas seulement un automate.
Dans la majorité des installations industrielles modernes, les deux coexistent : l’automate programmable pilote et coordonne la cellule, pendant que le robot exécute les opérations physiques. Ils communiquent via des protocoles industriels standardisés (Profibus, EtherNet/IP, Modbus) et forment un système automatisé cohérent.
Robot logiciel, robot physique et automate : ne pas confondre les usages ⚙️
Un point de confusion fréquent : le terme « robot » est aussi utilisé dans le monde informatique pour désigner des programmes automatisés — robots de scraping, bots conversationnels, RPA (Robotic Process Automation). Ces « robots logiciels » n’ont aucun composant physique. Ils automatisent des tâches numériques répétitives dans des systèmes informatiques.
La RPA (automatisation robotique des processus) est parfois présentée comme une forme d’automate logiciel : elle reproduit des actions humaines sur un ordinateur (cliquer, copier, coller, remplir des formulaires) de façon programmée, sans intelligence artificielle propre.
Un robot physique avec capteurs et actionneurs est fondamentalement différent : il agit dans le monde réel, manipule des objets, se déplace dans l’espace. Confondre ces deux définitions conduit à des incompréhensions dans les discussions sur l’automatisation et la robotique industrielle.
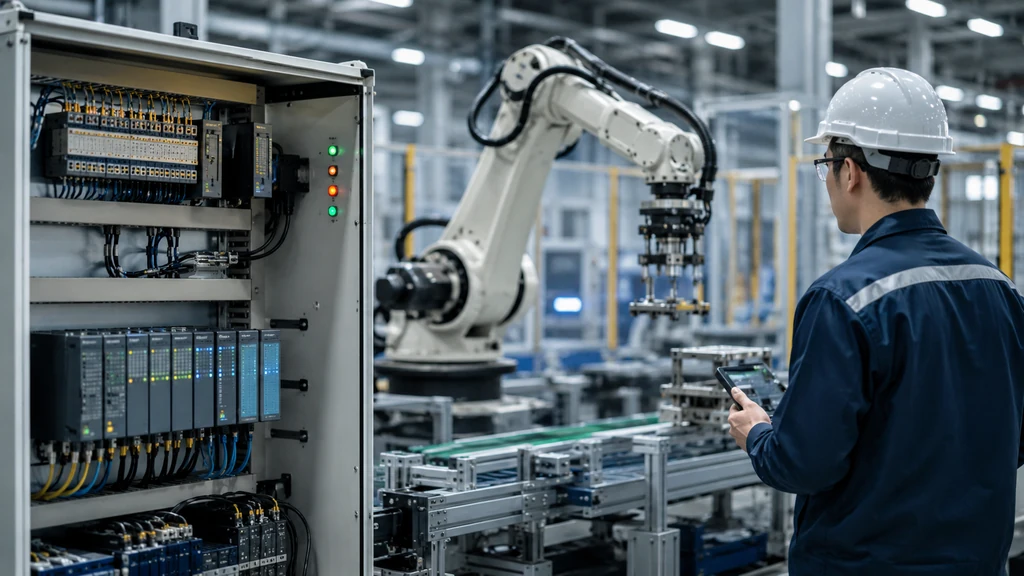
Automate programmable et robot industriel dans une cellule robotisée
Dans une cellule robotisée typique, l’automate programmable joue le rôle de chef d’orchestre. Il reçoit les ordres de production depuis le système de supervision (SCADA ou MES), séquence les opérations, gère les sécurités et communique avec le robot industriel.
Le robot, de son côté, exécute les trajectoires programmées, s’appuie sur ses propres capteurs pour ajuster ses mouvements et renvoie ses états à l’automate (tâche terminée, pièce détectée, erreur). Cette coopération entre API et robot constitue la base de l’automatisation industrielle moderne.
La tendance actuelle consiste à enrichir cette architecture avec des couches d’intelligence artificielle : vision par ordinateur pour le contrôle qualité, apprentissage automatique pour optimiser les trajectoires ou détecter les anomalies. Le robot devient alors plus adaptable, se rapprochant de la définition d’un système autonome, sans pour autant remplacer l’automate dans son rôle de coordination temps réel.